HDF5 input file format¶
Data dimensions¶
Raw detector images are stored as a J 3D datasets (N * M, K, L), where:
J raster scans (with angle or energy varying) consisting of
N scan lines and
M scan columns
detector images with shape (K, L) taken for each point
Obviously (N, M, K, L) as well as the nominal motor positions need to be equal for all J scans.
File structure¶
Each scan is stored in a separated HDF5 file, all of which are accessible through a “master” HDF5 file. See Fig. 1 below for an example.
Master file root:
Scan entry: J entries, one for each raster scan done with som varying motor position or energy (
NXentry)instrument (
NXinstrument)detector (
NXdetector)beam_energy: Beam energy in eV (
float)center_chan_dim0: Pixel of the direct beam when all angles=0 for first image dimension (
float)center_chan_dim1: Pixel of the direct beam when all angles=0 for second image dimension (
float)chan_per_deg_dim0: Pixel per degree in first image dimension (
float)chan_per_deg_dim1: Pixel per degree in second image dimension (
float)data: 3D dataset for this raster scan with shape (N * M, K, L), i.e., flattened along scan axes.
image_roi_offset: Optional. Offset for center chan if using only a ROI of the PSD. Default: [0, 0] (
[int, int])
positioners: This group contains datasets for all positioners. Dataset shape is either (1,) or (N * M,) (
NXcollection)
measurement: Group containing all the scan data with shape (N * M,) can be used, e.g., for normalization. Not mandatory (
NXcollection)adcX: X encoder position (1D array of float)
adcY: Y encoder position (1D array of float)
adcZ: Z encoder position (1D array of float)
image (
NXcollection)data: Link to
../../instrument/detector/datainfo: Link to
../../instrument/detector(NXdetector)
scan: Raster scan info
delay: Exposure time (
float)motor_0: Fast motor name (
string)motor_0_end: Fast motor end (
float)motor_0_start: Fast motor start (
float)motor_0_steps: Fast motor number of points (
int)motor_1: Slow motor name (
string)motor_1_end: Slow motor end (
float)motor_1_start: Slow motor start (
float)motor_1_steps: Slow motor number of points (
int)
start_time (
string)title: Scan title (
string)
Example¶
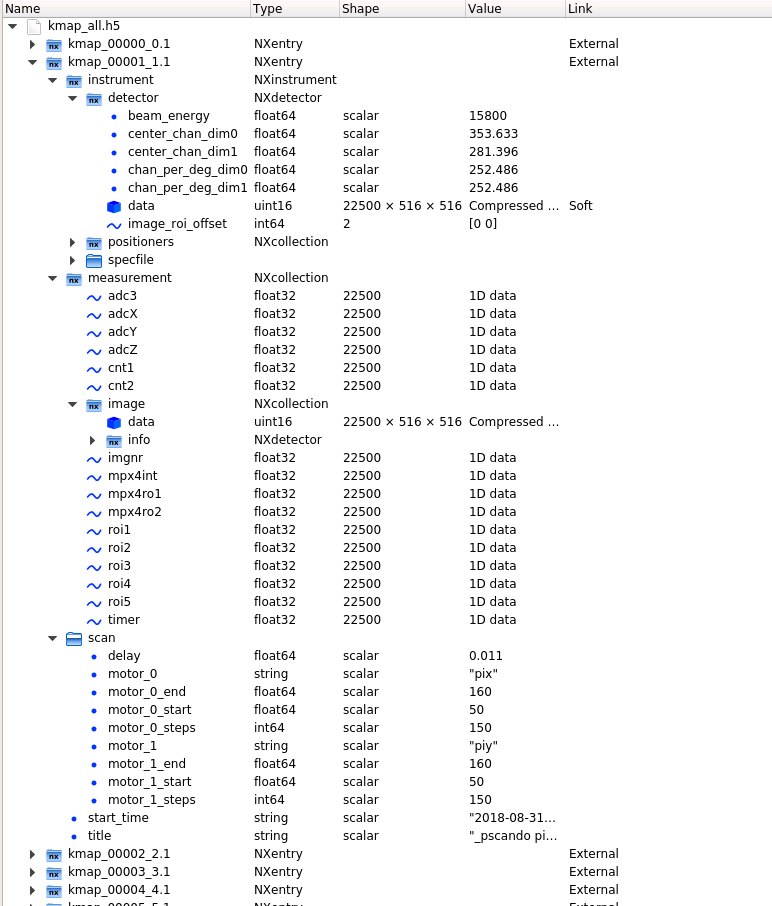
Fig. 1 Example of a X-Socs HDF5 input file structure¶